As a team of ten students, we developed a legged robot designed for microgravity environments. Our robot is able to demonstrate the key capabilities necessary for microgravity locomotion. The development of SpaceHopper continues, and one-day, SpaceHopper might explore the surface of asteroids.
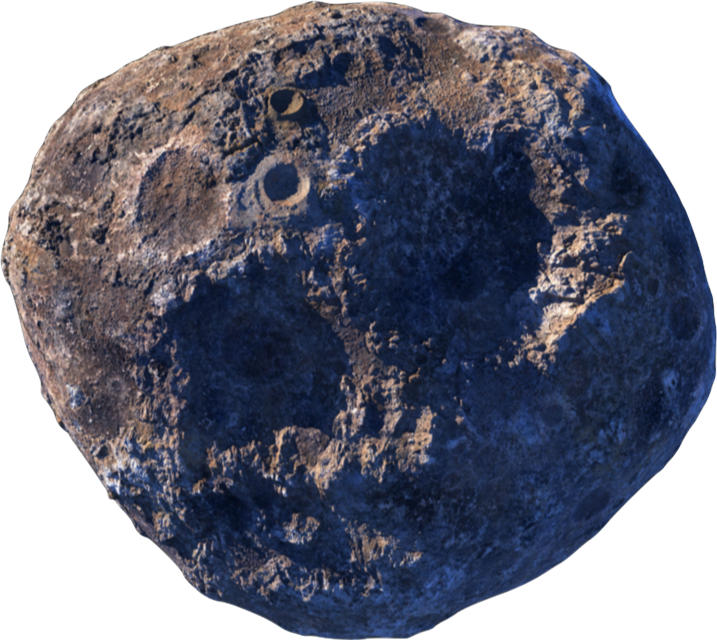
The challenging environment of asteroids calls for new, unique solutions. Our robot named SpaceHopper is a revolutionary, lightweight platform especially designed for low-gravity locomotion that could enable a broad range of new missions to explore this vast uncharted part of our solar neighborhood.

Three legs with three degrees of freedom each is the optimal lightweight solution for jumping in low gravity. Locomotion in any direction is easy, thanks to the lack of preferred orientation.
With this novel approach for low gravity rovers, we developed an entirely new locomotion concept for efficient travel in microgravity. This locomotion concept comprises six movement capabilities that ensure reliable and fast travel on an asteroid.
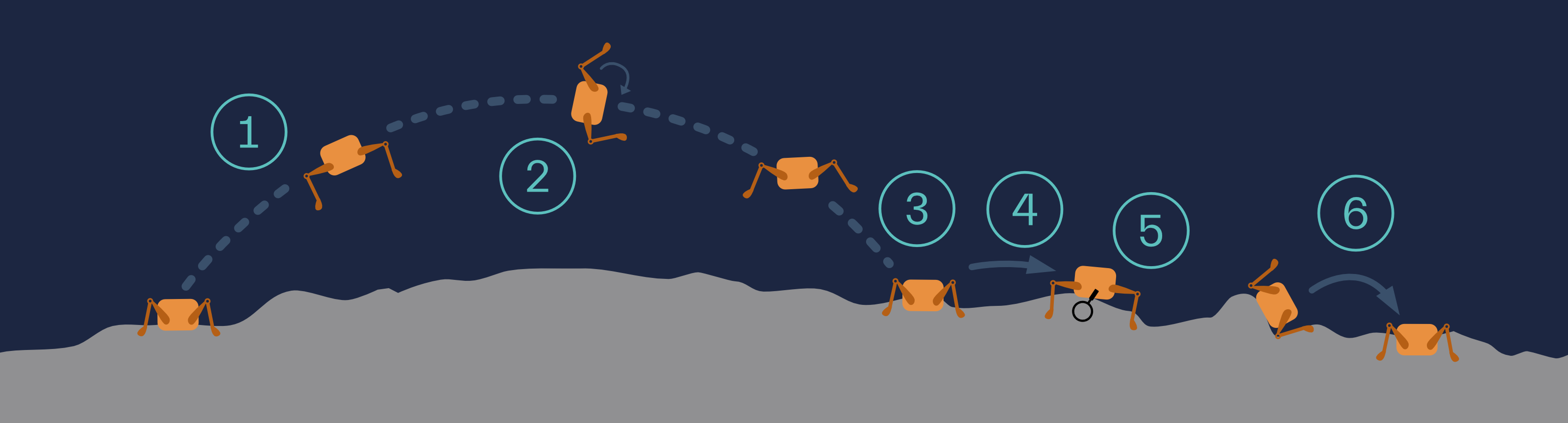
The combined power of all nine motors enables a strong and precise takeoff to overcome large obstacles and long distances.
Clever movements of its legs allow SpaceHopper to reorient itself without any flywheels. This ensures landing on the feet at any time.
Landing on its own feet allows for a soft landing without uncontrolled bouncing.
